Robot swarms are decentralized systems, composed of a large number of small and autonomous robots, capable of collective exploration, movement coordination, or dynamic task distribution among themselves [1,2].
These capabilities usually come from bio-inspired of physics-inspired algorithms which define the behavior of a robot according to its state at time t and its perception and action capabilities, the global behavior of the swarm emerging from local interactions between these robots.
By their very nature, robot swarms exhibit properties of self-organisation, robustness, and ability to scale [2]. that are very useful, but which make supervision (visualisation and understanding) and control by a human operator very difficult [3]. The very source of these properties, the emergence of the swarm behaviour from the interactions between the robots, prevents the operator from maintaining a correct mental model of this behaviour over time [4].
The ARTUISIS project focuses on the basic behaviours that lead to the spatial self-organisation of robot swarms, such as flocking, aggregation or area coverage. It aims at allowing an operator to:
Understand the core mechanisms of this self-organisation,
Supervise the behaviour dynamics,
Affect the spatial self-organisation in an intuitive, ergonomic and efficient way.
Project team and financial support
This project is funded by the ANR under the reference ANR_21-CE33-006-01.
The following members of the INUIT research team of the Lab-STICC laboratory (UMR 6285, CNRS) constitute the project team:
Jérémy Rivière - Assistant
Gilles Coppin
Sébastien Kubicki
Étienne Peillard -
Aymeric Henard - PhD student, started his thesis on October 2021.
The starting date of the project is October the 1st, 2021. The project will last for 42 months.
Proposal and expected contributions
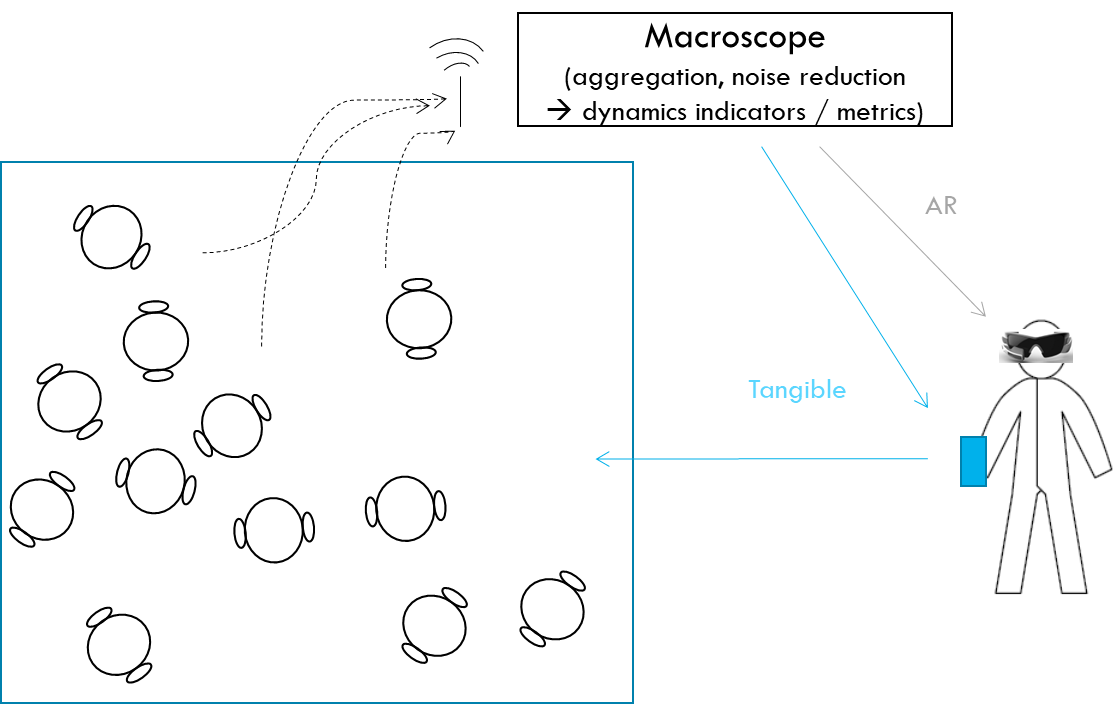
This project proposes to identify, and to make explicit through visualization, the mechanisms leading to the spatial self-organization of the robots in the swarm, and to set up specific interactors, able to represent and to affect the spatiality and the dynamics of the swarm.
This proposal could be an aid to the operator in understanding and designing behaviours.
The project's orginality lays on 1) the use of Augmented Reality to help the operator observe and understand the mechanisms of the swarm's behavior,
and 2) the design of a specific Tangible User Interface (TUI) to reflect the spatial dynamics of the swarm and affect it in a intuitive way.
The foolowing contributions are expected:
Identify and formalise the self-organisation mechanisms and construct indicators of these mechanisms based on local information,
Communicate in real-time the dynamc evolution of these mechanisms to the operator thanks to AR,
Design a deformable tangible interactor to represent and control certain aspects of the swarm's spatiality (its shape, its movement).
2021 - J.Rivière
Assistant Professor at UBO
Département Informatique / Lab-STICC
UFR Sciences et Techniques
20 Avenue Victor Le Gorgeu - 29238 Brest CEDEX 3