The Macroscope gathers information from the tracking system and the individual robots, and communicate :
In this video, each robot's dominating force is displayed, showing between attraction, repulsion, alignment or the lack of domination, using a coloured directional arrow above each robot: red, blue, green and white respectively. The robots exhibit a flocking behaviour.
In this video, the links between the connected robots are displayed to show their perceived neighbours. As well as showing the links between robots, the line's color (green, yellow, red) is modified according to the distance between the robots, until it disappears when the connection is broken, to show users how far the robots are from the break. The robots exhibit an expansion behaviour.
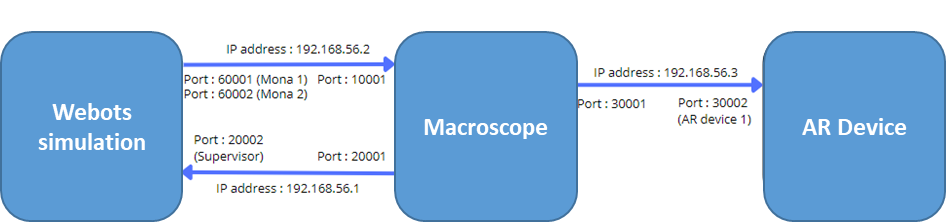
The Macroscope gathers information from a Supervisor agent in Webots and the simulated individual robots, and communicate :
In this video, the links between the connected robots are displayed to show their perceived neighbours. As well as showing the links between robots, the line's color (green, yellow, red) is modified according to the distance between the robots, until it disappears when the connection is broken, to show users how far the robots are from the break. The robots exhibit a flocking behavior.
In this video, the links between the connected robots are displayed to show their perceived neighbours. As well as showing the links between robots, the line's color (green, yellow, red) is modified according to the distance between the robots, until it disappears when the connection is broken, to show users how far the robots are from the break. The robots exhibit an expansion behavior.
This is an example of the use of the Attraction, Alignment and Repulsion method to obtain a self-organizing behavior of Aggregation.
This is an example of the use of the Attraction, Alignment and Repulsion method to obtain a self-organizing behavior of Coverage.
This is an example of the use of environmental constraints combined with the Attraction, Alignment and Repulsion method to obtain a self-organizing behavior of Shape formation.